Hwashi TIG Robot Spawalniczy Przystosowany do spawania szaf ze stali nierdzewnej

Opis
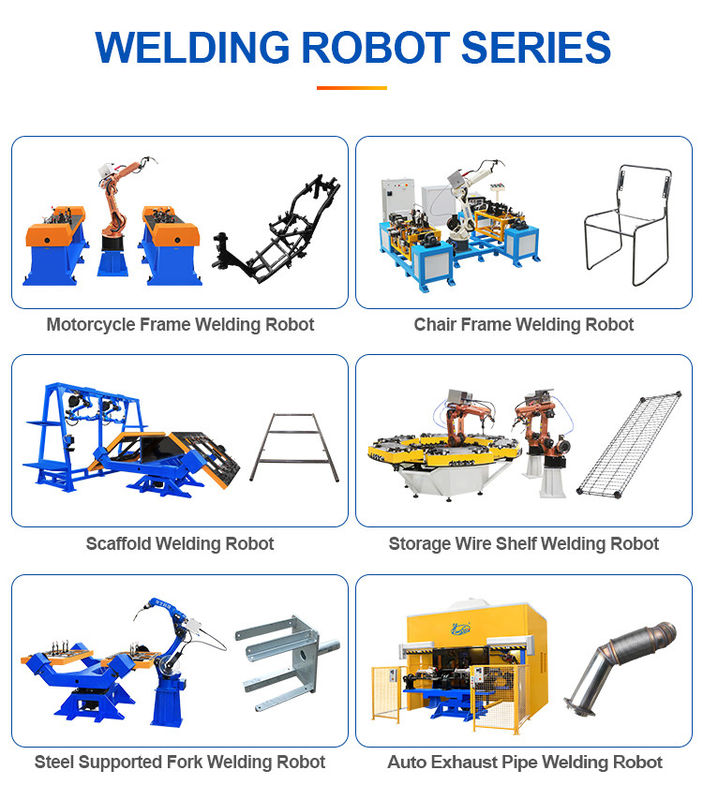
Robot spawalniczy HWASHI jest kompaktowy, ma niewielkie rozmiary, który jest dedykowanym robotem spawalniczym łukowym.dostęp do ścieżki spawania o wysokiej precyzji, skrócić cykl spawania, z wysoką dokładnością pozycjonowania powtarzania, szybkim biegiem, stabilnością procesu spawania, wysoką spójnością spawania i może skrócić cykl wymiany produktu,Odpowiednia inwestycja w sprzęt. Szeroko stosowane w branży motoryzacyjnej i akcesoriów, motocykli i akcesoriów, maszyn inżynierskich i innych dziedzin spawania metali.
1. Poprawa intensywności pracy pracowników, mogą pracować w szkodliwych warunkach.
2. skrócić cykl przygotowania produkcji, zmniejszyć inwestycje przedsiębiorstw.
3Stabilizuje i poprawia jakość spawania części roboczych.
4Zmniejszone wymagania dotyczące umiejętności obsługi pracowników.
5.Prosta obsługa, wygodna dla użytkowników.
Parametry P
| Model |
HS-R6-08 |
HS-R6-10 |
HS-R6-20 |
HS-R6-50 |
HS-R6-165 |
| DOF |
6 |
| Tryb jazdy |
Serwo napęd AC |
| Skuteczne obciążenie |
8 kg |
10 kg |
20 kg |
50 kg |
165 kg |
| Dokładność powtarzania |
± 0,05 mm |
| Poziom pracy |
1400 mm |
1589 mm |
1595 mm |
1950 mm |
2483 mm |
| Waga |
180 kg |
180 kg |
290 kg |
600 kg |
1300 kg |
| Zakres ruchu ((°) |
J1 |
± 170 |
± 170 |
± 170 |
± 180 |
± 180 |
| J2 |
± 120 ~ 85 |
± 120~-80 |
±132~-95 |
±130~-90 |
± 80~-60 |
| J3 |
± 85~-165 |
± 85~-165 |
±73~-163 |
±75~-210 |
±80~-190 |
| J4 |
± 180 |
± 180 |
± 180 |
± 360 |
± 360 |
| J5 |
±135 |
±135 |
±133 |
±115 |
±115 |
| J6 |
± 360 |
± 360 |
± 360 |
± 360 |
± 360 |
| Maksymalna prędkość ((°/s) |
J1 |
130 |
130 |
147 |
158 |
100 |
| J2 |
130 |
130 |
100 |
149 |
90 |
| J3 |
130 |
130 |
135 |
130 |
104 |
| J4 |
270 |
270 |
300 |
215 |
144 |
| J5 |
170 |
170 |
198 |
251 |
160 |
| J6 |
455 |
455 |
194 |
365 |
215 |
| Władza |
4 KVA |
4 KVA |
6KVA |
14 KVA |
31 KVA |
| napięcie |
380 V lub 220 V |
| Częstotliwość |
50 Hz lub 60 Hz |
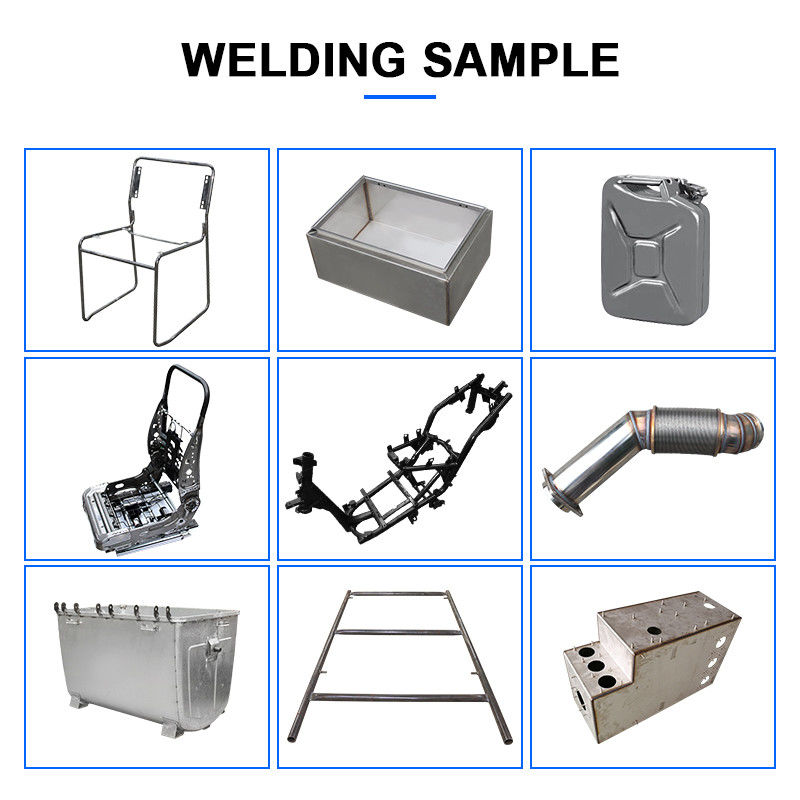
Wniosek i próbki
1. Układ sześciu stacji pozycjonera może zrealizować długotrwałe ciągłe spawanie, wydajność spawania i jakość spawania zostały znacznie poprawione;
2Pozycjonator realizuje jednoczesne zaciskanie obrabiarków i automatycznie realizuje zmienną spawanie czterech narożników produktu, efektywnie kontrolując deformację.
3. Maszyna ta może osiągnąć automatyczne spawanie przy ręcznym ładowaniu materiału. Może również poprawić jakość spawania i wydajność spawania. Co więcej, może zmniejszyć koszty produkcji.Problem niestabilnej jakości i niskiej wydajności produkcji spowodowany czysto ręcznym działaniem został rozwiązany.
4. Robot zastępuje spawanie ręczne. Przemysł spawalniczy jest przemysłem o wysokim ryzyku, wysoka temperatura, światło łukowe i dym spawalniczy mają pewien wpływ na zdrowie fizyczne i psychiczne pracowników;
5Nieuchronnym trendem jest wykorzystanie robotów do zastąpienia robotów spawalniczych w spawaniu, co jest nie tylko promocją rynku, ale także wymogiem modernizacji technologicznej.
Rozwiązania spawania
1Kompletny system robotów spawalniczych obejmuje 4 zestawy robotów HS-R6-08 o długości ramienia 1,4 m, 4 zestawy maszyn spawalniczych 350A MIG, 4 zestawy automatycznego pistoletu spawalniczego przeciwkolizji,1 zestaw jednoosiowego poziomowego pozycjonera obrotowego, 2 zestawy czyszczących pistoletów spawalniczych i 6 zestawów urządzeń spawalniczych itp.
2W celu zagwarantowania stabilności i spójności jakości spawania, proponujemy wyposażenie urządzenia oczyszczającego z pistoletu spawania.
3Automatyczne spawanie jest wykonywane przez sześcioosiowy robot spawacz MIG.Cylindry lub szybkie zaciski są używane do utrzymania pozycji produktu za pomocą zasady dźwigni w celu zapewnienia wymogów pozycjonowania automatycznego spawania robotaZgodnie z wymaganiami efektywności produkcji zaprojektowano 1 duży pozycjonator stołu obrotowego z sześcioma stacjami,4 urządzenia do załadunku obrabiarków, 1 urządzenie do spawania i 1 do rozładunku.
Proces pracy
1) ręczne załadunek obrabionego przedmiotu do urządzenia na stacji 1;
2) Rozpocznij spawanie;
3) Robot i spawarka będą spawać na obróbce zgodnie z ustawionym wcześniej programem;
4) zakończenie spawania;
5) Podczas spawania stacji 1 stacja 2 jest ładowana i montowana synchronicznie.
6) Praca cykliczna
Nasza firma

 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!